3.1 ���Ŀ��
��������֮���ڱ�������Χ�ڣ������α�������ΧΪ
3.2 ��������ͷ���
�����ǵ����������һ����Ҫ����,�볤�ڼ����ȣ������ⷶΧ���ޣ�����ʵʱ�;���Ҫ��ߣ��������������ɸ��֣���ҵ�������ѣ����������ȶ��Ļ��㣻���̶����Լ��Ե���Ӱ��̶ȵIJ�ͬ�ȵ��ص㡣
����Ŀǰ��Ҫ���ж�λ��⡢����λ�Ƽ�⡢ˮƽλ�Ƽ�⡢����������⡣
�������Ŀ�����̶Ե�����Ӱ��ֱ�����˹������Զ��������С�
�˹�����Dz����˹��ķ�ʽ��Ƶ�Ƚ������ݲɼ������г���λ�Ƽ�����ˮ����������ˮƽλ�Ƽ����þ�γ��������ͶӰ�������������������ù̶�ֱ��������
�Զ�������ǽ��Զ������������豸��װ�ڼ������Χ�ڽ�������ֵ�صĸ�Ƶ���Զ����ݲɼ���ͨ�����������ߵķ�ʽ���䵽�������ģ��Ӷ��ﵽʵʱ����Ŀ�ġ����г���λ�Ƽ���������ˮ��������ˮƽ�ߣ�ˮƽλ�Ƽ�����ȫվ���������Զ������
3.3��⾫��Ҫ��
һ�㹤�̰�1.4���涨���У���Խ���̰������й����ͨ���̲����淶��18.1.8���涨�����μ�����Ȱ����Ҫ�����,�����ָ��Ϊ
���ε�ĸ߳������Ϊ±
���ڱ��ε�ĸ߲������Ϊ±
���ε�ĵ�λ�����Ϊ±
3.4��ⷶΧ
�����ܱ�ʩ���Ļ���������Ĵ�ֱͶӰλ������������ʩ����ȵ�����Ϊ��������ķ�Χ��
3.5 ��������
��1�� ����λ�Ƽ��㣺��ͶӰ��Χ�ڰ����
��2��ˮƽλ�Ƽ��㣺λ�����ܶȰ������ص㲼��,�����ϼ�������ó�������̻������ı�ǣ��Դ���Ϊˮƽλ�Ƽ���λ�á�
��3������������������
����ʱ���������������̶��Ծ���������
�Ծ���λ�ã�
Сֱ���������ϻ���Լ
����ֱ�������գ�����������������
���̶��Ծ����˾����ù̶���־��ճ��ȫվ�Ƿ����⾵Ƭ��
����λ�ÿɽ����л��������ʼӹ���ר�ø������߱궨��
3.6 ���������ʵʩ
��λ���ֶ��ν���
ʩ��������������ݹ����ͨ��������(����״����)��ʩ����ƽ�����Ͻ��У�ȡ��ʩ�����������ṹ������ͨ�߽ṹ����Թ�ϵ���ݣ���Ϊ�������������֮һ��
��״���������ʵ�⣬ʵ��ʱӦʹ��ͬһƽ������߳�ϵ��Ӧ�ö������ߺ�ͼ��ˮ����ʵ��
ʩ��ʵʩ��
������״���Ϻ�ʩ�����ϼ���ʩ�������ڹ����ͨ�ߵ�ͶӰλ�ü���Ӧ�����ꡢ��̡����ţ��ɴ�ȷ������ķ�Χ��ȷ������ȶ�����������ʱӦ�ڹ����ͨ����ʵ�ط���ͶӰλ��
ʩ��λ��ʵ��ȷ����Ӧ��ʩ������Ĺ����ͨ�߲�λ���м����ȷ�ϣ����ڴ�Խ���������ͨ�ߵĹ��̻������ʩ���̻߳���ĸ���
�����ƽ���Զ������ߡ���ֱ��ͼ��ˮҪ�����
���ⷶΧ������ޣ�����볤�ڼ����ȣ�����Ĵ�ֱλ�Ƽ�������ص�
A.����ѡȡ���ѣ�����ѡ������ȶ�֮��������һ��������Ӱ�췶Χ�����
B��ˮ��·����
1.ˮ��������
һ������»���Ӧ�ڼ�ⷶΧ�Ķ��˷ֱ��裬ÿ�˲�����2����,����Ӧ��С��
���ö���ˮ�����ķ������г���λ�Ƽ�⣬ˮ·��Ӧ�պϻϣ�����Ҫ����ձ��ĵĵ�һ�µ�5�ڡ�
2.����ˮ����λ�Ƽ��
����ˮ�����Ĺ���ԭ����������Һ��ͨ����ͨ��,ʹ�������ʵ��Һ��ƽ��,�ⶨ���㡢�۲�㵽Һ��Ĵ�ֱ����,��������ֱ����֮��,���������ĸ߲
�ô������������۲��������Һ��ĸ߲�仯��������������������ڻ������Գ�����
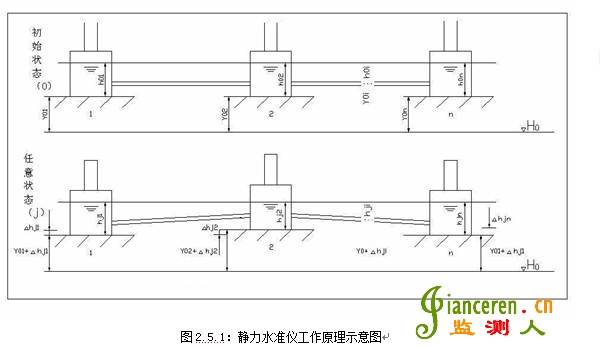

��������ˮƽ�����Һ����ı仯�ɲ����ṹ�Ľ�λ������ԭ������������λ�Ƽ������������ǽ���б�������̶���һ����ΪL��֧�����γ�һ����ˮƽ������ˮƽ�߰��ú������б�����������λ����θ����õ�ˮƽ��β�����ǰ�˵ij�����Ϊ��Δh=θ* L
�����ɸ�����ˮƽ��������β������ɳ���ʱ����n����ˮƽ��β����Գ����˵ij�����Ϊ
Hn=Δh1+Δh2+…………+Δhn
ΔhnΪ��n����ˮƽ��β�������ǰ�˵ij�������
�����ס�β����Ӧ����������ȶ������������㣬�ճ�������ֵ��������Ϊ������ƽ��������������λ�Ʋ���������
Ӧ����ʹ��ˮ������������ס�β���������Գ������������Գ�������С���»�����
���ж���ˮƽλ�ƵIJ��������ɹ�ѡ��.���ڵ����������ֳ���������Ӫ������Ψ��ͶӰ�������귨�Ƚ����˺ͳ���
1������ͶӰ��
����ͶӰ����������ԭ�����þ�γ�ǽ������ߣ��ⶨ���۲�㵽���ߵľ��롣
�ڼ���������˼��辭γ�ǻ�ȫվ�ǣ��ڼ����������ӳ�������һ����㣬��תһ�̶��Ƕ�β�������ܶ�������ͨ�ӣ���������һ�����ߡ��ڹ���ϻ���������ϸ��“��”�֣��Դ���Ϊ�õ�ƽ��λ�Ƽ��ij�ʼλ�á����ճ�����У�����ͬ�������۲⣬��תһ�̶��Ƕ�β����λ����“��”��֮��ľ���Ϊ�õ�ˮƽλ�Ƶ��ۼ�ֵD��D����ͨ���α꿨�����⡣

2��С�Ƕȷ�
��վ�Ͷ���ͬͶӰ������ÿ��������нǶȹ۲⣬ͨ���Ƕȵı仯�������ˮƽλ�Ʊ仯��
D=��α/206265��*L
����
D——����ˮƽλ���ۼ�ֵ
α——ƫ�ǣ�������
L——��վ�㵽����ľ��루mm��
3��������ƫ�Ʒ���
��������·����������·�������ͨ�����˼�վ���������м���ʱ���ɲ��÷�����ƫ�Ʒ����м�⡣
���÷�����ƫ�Ʒ���ˮƽλ�Ƽ�����б��ι۲⡣��ͼ��ʾ�� A���B��Ϊˮƽλ�Ƽ����Ƶ㡣

ÿ�μ��ʱ����Ҫ����∠APB�ǵı仯�������P��ĺ���λ�������ٲ���∠APi�ǵı仯�����Ӷ������۲��i�ĺ���λ�����������ĺ���ˮƽλ�Ƽ��㰴��ʽ��
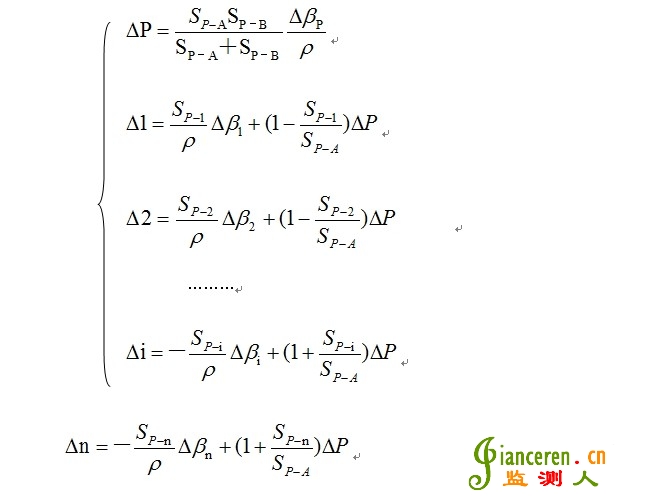
����ÿһ��ʩ�������ڲ�վ��λ�Ƶ��趨�Ϳ���ø���֮��ľ��룬�Ӷ���������ø���ϵ�����Ժ�ֻҪ��ýǶȱ仯
4����̨ȫվ��λ�����ϵͳ
��̨ȫվ��λ��ʵ�������Զ����й۲�ļ��������ϵͳ��
�Ե�̨TCA��ȫվ�Ǻ�����Ӳ������ɵ�λ�Ƽ��ϵͳ������㡢������ͨѶ�����ݴ����Ĵ֡���ͼ��Ϊ��ϵͳ�Ļ�����ɣ�
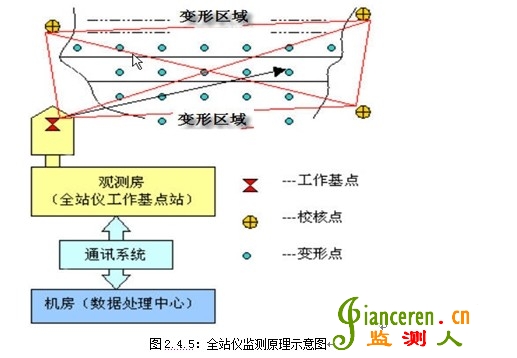
���������ϼ���ȫվ�ǣ��Զ���㶨���������������ڵı��ε㣬�õ��������ά����ֵ����Ϊ����ֵ�����룩��ͨ�����������ߵķ�ʽ�����ݴ����������ģ��������ݵĴ������ø����ε������ֵ����ǰһ�۲���������ֵ��Ƚϣ��õ������ε��λ�����������ɱ�����
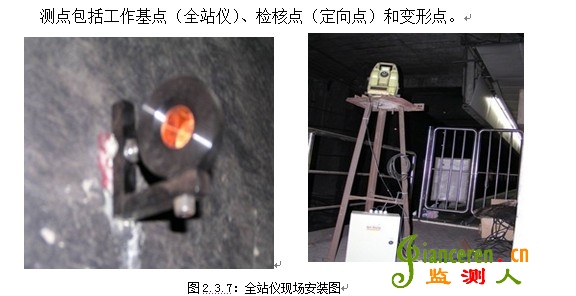
����ʱ���������������̶��Ծ�������
3.3������“���ε�ĵ�λ�����Ϊ±
�̶��Ծ�����ʱ����ȫվ�������в����ⶨÿһ�Ծ�����������Ƭ��ͬһ����ϵ�е�����Xa��Ya��Za��Xb��Yb��Zb��
����õ���ֱ���˵��ƽ��D�߲�h
������ƽ�����ֵ��ԭʼֵ���бȽϣ����Եõ��������öԾ��仯�����
�����θ߲����ֵ��ԭʼֵ���бȽϣ����Եõ�������ƫת�仯���