自动监测网络系统在地铁结构监测中的应用
卫建东
测量机器人具有的自动寻找目标,自动精确照准功能,使其在结构物外部变形监测方面拥有极大的优势和应用前景。它的出现大大减轻了以往人工测量带来的繁重劳动,将测量机器人通过现代通信技术与计算机连接起来,利用计算机软件实现数据的采集、处理和报表输出,实现真正意义上的测量自动化和一体化。目前单台测量机器人组成的极坐标测量系统,利用多重实时差分技术,已在大坝、桥梁、隧道等工程得到很好的应用。但利用实时差分技术的单台极坐标测量系统除要求基准点稳定外,还要求测站点是稳定。这对变形区域较大,通视条件较差,测量环境狭窄的地铁隧道来说,显然其应用受到限制。当然,如果测站点是不稳定的,我们只要知道其变化后的位置,一样可以利用多重实时差分技术解算变形点的坐标。由多台测量机器人组成的网络监测系统,可以通过组网解算各测站点的坐标,然后利用基准点和各测站坐标对变形点观测数据进行差分处理,解算出各变形点的坐标及变形量。
1系统的硬件组成
测量机器人网络监测系统的硬件部分包括测量机器人、棱镜连接器、目标棱镜、信号通信设备与电源箱、计算机、网络设备等组成。
1.1 测量机器人
测量机器人是具有目标自动识别与照准功能全站仪的俗称。Leica公司生产TCA1800、TCA2003自动全站仪属于这一类型。它们的ATR(Automatic Target Recognition)自动照准功能,如采用Leica标准圆棱镜可达
1.2棱镜连接器
在测量机器人网络监测系统中,为获取测站仪器中心(全站仪旋转中心)坐标而进行的组网测量中,测站本身既是测站又是其它测站的镜站。因此,需要将棱镜固定在全站仪手柄上,全站仪的转动实现棱镜的转向,安装棱镜时要求棱镜中心与仪器中心位于同一铅垂线上。棱镜连接器作用就是将棱镜固定全站仪手柄上,通过调整连接器上两方向上的微动螺丝,使棱镜垂直中心轴线与全站仪旋转中心垂线一致。见图1全站仪手柄上所示。
1.3信号通信设备与电源箱
信号通信设备与电源箱包括:通信电缆、供电电缆、RS422接口转换器、电源箱。
RS422接口转换器实现RS232到RS422通信方式的转换,使有效通信距离大于
1.4计算机部分
计算机部分包括主控计算机与分控计算机。主控计算机负责测量整体安排,根据时间、测量次序等指示分控计算机进行操作,同时接受分控计算机发来的测量数据,对各站测量数据进行同一处理计算。分控计算机用来接受主控计算机的指令,直接控制全站仪的操作,每台分控计算机控制对应的一台全站仪。
1.5网络设备
网络设备由网络交换机和网线组成,主控计算机通过网络设备实现与分控计算机连接与数据的传输。
1.6目标棱镜
目标棱镜设置在基准点和变形点上。基准点是结构变形监测的基准,因此他们分布在离变形区较远的地方,以保证其稳定。变形点选在变形体的敏感部分,能够反应变形体的变化。目标棱镜一般选择标准圆棱镜或L小棱镜,当目标较近时可以选择L小棱镜,目标较远时采用标准圆棱镜,基准点上一般采用标准圆棱镜。
1.7系统硬件组成各部分控制连接关系
整个监测系统硬件各部分之间的连接控制关系,见图2所示。远程监控计算机通过因特网控制主控计算机,主控计算机通过网络交换机与各分控计算机进行通信,各分控计算机通过供电与通讯系统与测量机器人相连。

该系统能够连接的全站仪数量可以超过10台。
2 系统的软件构成
系统软件包括控制网测量软件和变形点监测软件两大部分。
2.1控制网测量软件
控制网测量软件用来获取各测站点实时坐标数据,即所谓的动态基准测量。当全站仪测站点位于变形区域,为及时得到测站点的位置信息,将测站点纳入控制网中,控制网的已知点位于变形区域外,也是变形控制网中的基准点。由于在控制网自动测量过程中,测站本身又是其它测站点的镜站,因此,要协调各测站以保证测站与镜站之间的相互配合。控制网测量软件包括主控机软件和分控机软件。
主控机软件主要用来流程控制,根据流程依次向各分控机发操作指令,并接收分控机返回的提示信息、测量数据等,根据返回的信息做相应的处理。测量数据的数据库管理、控制网的平差计算在主控机内完成。所有测量人员的测量意图的设置都是在主控机软件里进行。
分控机软件主要是执行主控机发来的指令,并根据主控机的指令,向测量机器人发操作指令,并接收测量机器人返回的信息、数据,将这些信息、数据分析处理后发给主控机。分控机软件在整个系统中担当中转站的角色。分控机软件中人机交互只有设置端口号一项内容,所有对全站仪的操作指令封装在分控机软件中。
控制网测量软件在功能上主要有以下特点:根据距离及棱镜布设情况自动进行大小视场的切换;依据布设的网形,站与站之间的观测关系,对测站点的观测方向点可分组设置;采用局域网技术进行数据的通信,每台仪器动作信息实时显示到主控机,并具有网络断开的自动判断功能;为满足各种测量等级和运营环境的需要,具有各项测量限差、时间延迟、重试次数、坐标修正的设置功能;考虑到地铁内局部范围内气象一致性,在平差计算中,采用加尺度参数解算,避免了气象参数的测定。

控制网测量软件将整个系统的通信分成两部分进行,主控机与各分控机组成一个主局域网,在该局域网中,主控机相当于客户机,各分控机相当于服务器。因此,该局域网客户机与服务器的连接关系为一台客户机对多台服务器,采用TCP/IP网络通信协议。各分控机与其控制TCA全站仪之间组成分局域网,采用串口通信,在该局域网中,分控机相当于客户机,TCA全站仪相当于服务器,是一对一的关系。
2.2变形点监测软件
变形点监测软件包括各分控机上安装的监测软件和主控机上安装的数据库管理软件两部分。
分控机上的监测软件用来控制测量机器人按要求的观测时间、测量限差、观测的点组进行测量,并将测量的结果写入主控机上的管理数据库中。该软件继承了单台测量机器人变形监测软件ADMS的大部分功能,并根据网络监测系统需要,对数据库进行了优化。另外,在隧道环境中的变形监测,如果需要监测的变形点较多,测量机器人对远处目标的识别时,可能在视场中出现多个棱镜,此时必须打开测量机器人的小视场功能,而小视场的测量范围不得小于
数据库管理软件用来管理各分控机写来的数据,将这些数据通过多重差分技术,求解各变形点的变化量,并将这些变形数据曲线图形显示和各点变形量报表输出。
3 系统在地铁结构变形监测中的应用实例
广州地铁某地铁站上方进行房产的开发,需挖掘沿地铁站两侧长约
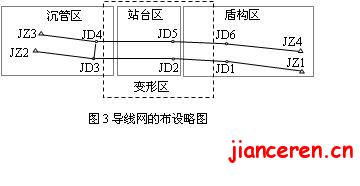
该系统采用了六台Leica生产的自动目标识别全站仪,其中两台TCA2003,四台TCA1800。各测站点和基准点安置在地铁负二层的隧道中,各点布设位置如图3所示,JD1~JD6为测站点,JZ1~JZ4为基准点。测站点上安置全站仪,基准点上安置徕卡标准圆棱镜。
基准点与测站点构成控制网来测定各测站的实时坐标的变化。图3所示为动态基准测量控制网的布设形式,JZ1、JD1、JD2、JD3、JZ2位于上行线上,JZ3、JD4、JD5、JD6、JZ4位于下行线上,JD3与JD4之间可以通视,基准点与测站点构成无定向三维导线网。
在整个变形区域内,沿上、下行线各布设21个监测断面,其中盾构区每个断面设置5个变形点,站台区、沉管区每个断面设置4个变形点,每个断面上变形点的分布如图4所示。图5为下行线盾构区变形点分布实景图,图中的亮点为变形点上的棱镜。
测量机器人地铁结构自动化网络监测系统的控制中心设在负一层的环控机房内,主要放置了一台主控计算机和六台分控机,是整个监测系统的中枢部分。分控计算机到全站仪的通讯距离最大超过
目前,系统已运行3个月,整个系统运行正常,共获得200多个周期监测数据。从已得到的数据看,测量精度达到理想结果,完全满足地铁结构变形监测的要求。
4 系统的应用前景
测量机器人网络监测系统继承了单台测量机器人监测系统的优势,拓宽了单台测量机器人监测系统的应用领域,能够满足较大变形区域的自动监测,尤其对地铁结构的自动监测。主要优势有以下几点:
(1)系统实现了控制网测量自动化、变形点监测自动化。在列车运行条件下,实现全天24小时连续地自动监测,克服了传统测量方法的不足,节约了大量的人力资源,为地铁的安全提供了实时的安全运营保障。
(2)系统将控制网测量、变形点监测组织为一个整体,协调工作,控制网测量完成后,自动进行平差计算,并将测站点坐标数据传给变形点监测软件,所有数据的储存和处理都在数据库内进行,实现了数据的无缝连接。
(3)系统在控制网平差计算中采用加尺度参数解算,在变形点坐标解算中采用多重差分技术,可以最大限度地消除或减弱多种误差因素,从而大幅度地提高测量结果的精度,并简化了气象等附加设备,实现系统在计算机控制下的全自动、高精度实时监测。
(4)系统的实时数据处理、数据分析、报表输出、变形量的曲线图形显示功能,为监测工程提供了多种数据资料。
(5)系统采用了网络数据传输、控制与管理技术,为远程监控管理和系统维护提供了方便,并降低运行成本。
测量机器人网络监测系统集自动测量技术、串口通信技术、网络通讯技术、远程监控等为一体,以其自动化、高精度的技术优势,将在越来越多的变形监测领域得到广泛应用。
参考文献:
[1] 张良琚 徐忠阳包欢.自动极坐标实时差分监测系统及其在大坝外部变形监测中的应用[J].测绘通报,2001,(9).
[2] 卫建东. 智能全站仪变形监测系统及其在地铁结构变形监测中的应用[D].郑州:信息工程大学测绘学院,2002,4.
[3] 袁伯冕.香港九龙圹站地铁隧道检测报告[J].地壳形变与地震,1998,(增2).
[4] 于来法.论地下铁道的变形监测[J].测绘通报,2000,(5).
[5] 汪晓平 钟军.Visual C++网络通信协议分析与应用[M].北京:人民邮政出版社,2003.
[6] 郑金淼.自动导线测量系统及其在顶管施工中的应用[J].测绘通报,2001,(1).