ЙиМќДЪ:ДѓАгАВШЋМрВт;ЫЎЦНЮЛвЦ;ДЙжБЮЛвЦ;Ш§ЮЌЮЛвЦ;МЋзјБъЗЈ;ОрРыНЛЛсЗЈ;GPS ЗЈ;здЖЏМрВтЯЕЭГ
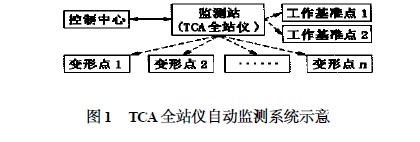
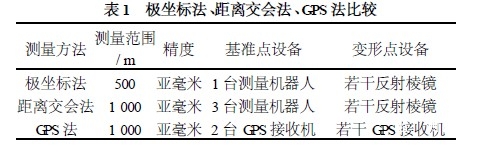
еЊЁЁвЊ:ЭтВПБфаЮЙлВтЪЧДѓАгАВШЋМрВтЯЕЭГЕФживЊзщГЩВПЗжЁЃФПЧАГЃгУЕФМрВтЗНЗЈжївЊга: ЂйЫЎЦНЮЛвЦМрВтЕФЪгзМЯпЗЈЁЂв§еХЯпЗЈЁЂМЄЙтзМжБЗЈЁЂе§ЕЙДЙЯпЗЈЁЂОЋУмЕМЯпЗЈКЭЧАЗННЛЛсЗЈ; ЂкДЙжБЮЛвЦМрВтЕФМИКЮЫЎзМЗЈЁЂСїЬхОВСІЫЎзМЗЈ; ЂлШ§ЮЌЮЛвЦМрВтЕФМЋзјБъЗЈЁЂОрРыНЛЛсЗЈКЭGPS ЗЈЁЃШ§ЮЌЮЛвЦМрВтЯЕЭГПЩЪЕЪБСЌајЙлВтБфаЮЕуЕФЫЎЦНЮЛвЦКЭДЙжБЮЛвЦЁЃВтСПЛњЦїШЫздЖЏМрВтЯЕЭГдкаЁРЫЕзДѓАгГЩЙІгІгУ,ЪЕЯжСЫДѓАгЭтВПБфаЮМрВтЕФШЋздЖЏЛЏЁЃЫцзХПЦММЕФВЛЖЯЗЂеЙ,ДѓАгАВШЋМрВтздЖЏЛЏЯЕЭГвЛЖЈЛсИќМгЭъЩЦЁЃ
ДѓАгЭтВПБфаЮМрВтЪЧДѓАгАВШЋМрВтЕФживЊФкШн,ЯжгаИїжжИїбљЕФМрВтЗНЗЈЁЃЮоТлВЩгУФФжжЗНЗЈ,ЖМБиаыТњзуОЋЖШвЊЧѓЁЃШчдкЁЖЛьФ§ЭСДѓАгАВШЋМрВтММЪѕЙцЗЖЁЗ(1989 ФъЪЕЪЉ) жаЙцЖЈ,жиСІАгЁЂжЇЖеАгЕФАгЬхЫЎЦНЮЛвЦОЋЖШЮЊ±1 mm ,АгЛљЮЊ±013 mm ,ЫљгаЛьФ§ЭСАгЕФАгЬхМААгЛљЕФДЙжБЮЛвЦЕФОЋЖШвЊЧѓЮЊ±1 mm ,АгЛљЧуаБЕФОЋЖШвЊЧѓЮЊ±1″ЁЃетаЉЙцЖЈЖдМрВтЙЄзїЬсГіСЫБШНЯИпЕФвЊЧѓЁЃЕЋДгЪЕМЪЧщПіРДПД,етаЉвЊЧѓвЛАужЛЪЧЗћКЯАВШЋЕФзюЕЭжЕ,ЪЕМЪВйзїжагІИУБШЙцЗЖЕФвЊЧѓИќИп,етЮовЩдіМгСЫВтСПЙЄзїЕФФбЖШЁЃ
ДѓАгЭтВПБфаЮМрВтЕФЯюФПвЛАуЗжЮЊ:ЫЎЦНЮЛвЦМрВтЁЂДЙжБЮЛвЦМрВтЁЂШ§ЮЌЮЛвЦМрВтЁЂФгЖШМрВтКЭЧуаБМрВтЕШЁЃ
1 ЁЁЫЎЦНЮЛвЦМрВт
ЫЎЦНЮЛвЦМрВтЗНЗЈгаЪгзМЯпЗЈ,в§еХЯпЗЈ,МЄЙтзМжБЗЈ,е§ЁЂЕЙДЙЯпЗЈ,ОЋУмЕМЯпЗЈКЭЧАЗННЛЛсЗЈЕШЁЃ
1.1 ЁЁЪгзМЯпЗЈ
ЪгзМЯпЗЈГЃгУгкжБЯпаЭДѓАгЕФЫЎЦНЮЛвЦЙлВт,ЖдгкЗЧжБЯпаЭДѓАг,ПЩВЩгУЗжЖЮЪгзМЯпЕФЗНЗЈЪЉВтЁЃЪгзМЯпЗЈЕФЬиЕуЪЧЙЄГЬдьМлЕЭ,ЕЋОЋЖШЕЭ,ВЛвзЪЕЯжздЖЏЙлВт,ЪмЭтНчЬѕМўгАЯьНЯДѓ,ЖјЧвБфаЮжЕ(ЮЛвЦБъЕуЕФЮЛвЦСП) ВЛФмГЌГіИУЯЕЭГЕФзюДѓЦЋОржЕ,ЗёдђЮоЗЈНјааЙлВтЁЃЬсИпЪгзМЯпЗЈОЋЖШМАздЖЏЛЏГЬЖШЕФДыЪЉга:ИФНјЙлВтММЪѕКЭВйзїЗНЗЈ,бЁгУИпОЋЖШвЧЦї,ШчTCA2003 здЖЏИњзйШЋеОвЧЁЃ
1.2 ЁЁв§еХЯпЗЈ
в§еХЯпЗЈЕФЬиЕуЪЧГЩБОЕЭ,ОЋЖШИп(жївЊШЁОігкЖСЪ§ОЋЖШ,ШЫЙЄЖСЪ§ОЋЖШЮЊ012ЁЋ013 mm ,здЖЏЖСЪ§ОЋЖШгХгк±011mm) ,ЪмЭтНчЬѕМўгАЯьаЁ,гІгУНЯЦеБщЁЃзюаТЕФв§еХЯпВтСПЯЕЭГГЃВЩгУЯпеѓCCD ДЋИаЦї,ФмЪЕЯжздЖЏЖСЪ§,ЦфСПГЬЮЊМИРхУз,ОЋЖШгХгк±1 mmЁЃв§еХЯпЗЈЕФЗЂеЙЧїЪЦЪЧЫЋЯђв§еХЯп,ЫќМШФмЙЛЙлВтЫЎЦНЗНЯђЕФЮЛвЦ,гжФмЙлВтДЙжБЗНЯђЕФЮЛвЦ,ЬсИпСЫЙлВтаЇТЪЁЃ
1.3 ЁЁМЄЙтзМжБЗЈ
1.3.1 ЁЁДѓЦјМЄЙтзМжБ
ДѓЦјМЄЙтзМжБЕФгІгУЖдЯѓЪЧАгГЄаЁгк300 mЁЂАгИпНЯЕЭЕФДѓАг,ВтСПЯрЖдОЋЖШЮЊ10 - 5ЁЋ10 - 6 ЁЃгЩгкЪмДѓЦјелЩфМАЭФСїгАЯьЛсв§Ц№ЙтЪјЖЖЖЏ,ИУЗЈВтСПОЋЖШЕЭЧвВЛвзЪЕЯжздЖЏЛЏЙлВтЁЃДѓЦјМЄЙтзМжБММЪѕЕФзюаТЗЂеЙЪЧВЩгУCCD ММЪѕЁЃЫќЯћГ§СЫЙтАпЫцЛњЖЖЖЏ,ЪЕЯжСЫМрВтздЖЏЛЏ,ВтСПОЋЖШИпДя±011mmЁЃДЫЯюММЪѕвбГЩЙІЕигІгУгквЛаЉЫЎЕчЙЄГЬЕФБфаЮЙлВтжаЁЃ
1.3.2 ЁЁецПеМЄЙтзМжБ
ецПеМЄЙтзМжБзлКЯОЋЖШИпДя(1ЁЋ2) ×10 - 7 ,жївЊгУгкГЄАгЁЂИпАгЕФБфаЮМрВт,ЦфЗЂеЙЗНЯђЪЧЫЋЯђЮЛвЦЙлВт(ДЙжБЮЛвЦКЭЫЎЦНЮЛвЦ) ЁЃЮЊСЫЭиеЙЦфгІгУПеМф,ПЩПМТЧЪЕЯжецПеМЄЙтзЊНЧ,вдБугУгкЧњЯпаЮДѓАгЕФБфаЮМрВтЁЃ
1.4 ЁЁе§ЕЙДЙЯп
е§ЁЂЕЙДЙЯпМШПЩвдЪЕЯжЫЎЦНЮЛвЦМрВт,гжПЩЪЕЯжЛьФ§ЭСАгЕФФгЖШЙлВтЁЃаТНќбажЦЕФДЙЯпЙлВтвЧВЩгУЯпеѓCCD ДЋИаЦї,ЪЕЯжСЫЖСЪ§здЖЏЛЏЁЃдкx , y ЗНЯђЩЯЕФзјБъБфЛЏжЕВЩМЏОЋЖШгХгк±011 mm
1.5 ЁЁОЋУмЕМЯпЗЈ
ЙААгЕФЫЎЦНЮЛвЦМрВтГЃВЩгУОЋУмЕМЯпВтСПЗЈЁЃДЫЗЈгІгУНЯЮЊЙуЗК,ЕЋСПБпЙЄзїСПДѓ,НЧЖШЙлВтЪмХделЙтгАЯьНЯДѓЁЃЮЊДЫ,ПЩВМЩшГЩРрЫЦгкИпФмЮяРэМгЫйЦїЙЄГЬжаЕФВтИпжБЩьЛЗаЮЭј,ЭЈЙ§ВтСПЯСГЄШ§НЧаЮЕФБпГЄКЭИпЕФЭООЖ,РДМфНгЬсИпВтНЧОЋЖШЁЃИУЗЈЕФОЋЖШШЁОігкСПБпОЋЖШ,ШчЙћгУюїИжЯпГпСПБп,ЛђME5000 ВтОрвЧВтБп,ОЋЖШЭъШЋПЩвдДяЕНбЧКСУзМЖЁЃ
1.6 ЁЁЧАЗННЛЛсЗЈ
дкИїжжЫЎЙЄНЈжўЮяЕФЪЉЙЄНзЖЮЛђвбНЈГЩЕФЙААгЯТгЮУцЁЂЙАЙкЕШЙлВтаЇТЪНЯЕЭЧвЙлВтЪБВЛвзжБНгЕНДяЕФВПЮЛ,ПЩвдгУВтБпЁЂВтНЧЛђБпНЧЧАЗННЛЛсЗЈВтЖЈЦфЫЎЦНЮЛвЦЁЃЧАЗННЛЛсЗЈгЩгкЪмВтНЧЮѓВюЁЂВтБпЮѓВюЁЂНЛЛсНЧМАЭМаЮНсЙЙЁЂЛљЯпГЄЖШЁЂЭтНчЬѕМўЕФБфЛЏЕШвђЫигАЯь,ОЋЖШНЯЕЭ,вЛАуЮЊ±(1ЁЋ3) mmЁЃСэЭт,ЦфЙлВтЙЄзїСПНЯДѓ,МЦЫуЙ§ГЬНЯИДдг,ЙЪВЛЕЅЖРЪЙгУ,ЖјЪЧГЃзїЮЊБИгУЪжЖЮЛђХфКЯЦфЫћЗНЗЈЪЙ
гУЁЃ
2 ЁЁДЙжБЮЛвЦМрВт
ДЙжБЮЛвЦМрВтЕФжївЊЗНЗЈгаМИКЮЫЎзМЗЈКЭСїЬхОВСІЫЎзМЗЈ(СЌЭЈЙмЗЈ) ЁЃ
2.1 ЁЁМИКЮЫЎзМЗЈ
МИКЮЫЎзМЗЈЪЧДЙжБЮЛвЦМрВтЕФГЃгУЗНЗЈ,ОЋЖШШнвзТњзу,ЕЋжївЊЮЪЬтЪЧШчКЮЪЕЯжЙлВтздЖЏЛЏЁЃФПЧА,ОпгаздЖЏВЩМЏЁЂДЂДцзЪСЯЕФЕчзгЫЎзМвЧвбдкЩњВњжаЪЙгУ,ЦфОЋЖШПЩДя±(013ЁЋ014) mm (УПЧЇУзЭљЗЕВтИпВюжаЪ§ЕФжаЮѓВю) ,ЙЄзїаЇТЪУїЯдЬсИпЁЃ
2.2 ЁЁСїЬхОВСІЫЎзМЗЈ
СїЬхОВСІЫЎзМЗЈВтСПдРэЪЧСЌЭЈЙмдРэЁЃИУЗЈКмШнвзЪЕЯжЖСЪ§МАДЋЪфЕФздЖЏЛЏ,ВтСПОЋЖШгХгк±011 mm ,дкДЙжБЮЛвЦМрВтжагазХЙуЗКЕФгІгУЁЃЕЋОВСІЫЎзМЕФВтЕуЛљБОЩЯвЊДІгкЭЌвЛЫЎЦНЮЛжУ,ИпВюВтСПЗЖЮЇНЯаЁЁЃНќФъРДбажЦПЊЗЂГіСЫЭЈЙ§бЙСІДЋИаЦїВтСПвКЬхбЙСІЕФБфЛЏРДМЦЫуИпВюБфЛЏЕФ
вЧЦї,РЉДѓСЫВтСПЗЖЮЇЁЃ
3 ЁЁШ§ЮЌЮЛвЦМрВт
вдЩЯИїжжМрВтЗНЗЈЪЧНЋБфаЮЕуЕФЫЎЦНЮЛвЦКЭДЙжБЮЛвЦЗжБ№ЪЉВт,ВтСПГЩЙћВЛОпгаЭЌЪБад,НЕЕЭСЫГЩЙћЕФПЦбЇадКЭЪЙгУМлжЕ,ЖјЧвВЩгУГЃЙцЗНЗЈЙлВтжмЦкГЄ,ЮоЗЈЪЕЪБЕиСЫНтДѓАгЕФБфаЮЧщПіЁЃФПЧАвббажЦГівЛжжФмЪЕЪБСЌајЙлВтБфаЮЕуЫЎЦНЮЛвЦКЭДЙжБЮЛвЦЕФВтСПЯЕЭГ,гЩгкДЫЯЕЭГВтСПЕФЪЧБфаЮЕуЕФШ§ЮЌЮЛвЦжЕ,ЙЪГЦЮЊ“Ш§ЮЌЮЛвЦМрВтЯЕЭГ”,АДЦфдРэКЭЙлВтЗНЗЈПЩЗжЮЊМЋзјБъЗЈЁЂОрРыНЛЛсЗЈЁЂGPS ЗЈЁЃ
3.1 ЁЁМЋзјБъЗЈ
ИУЗЈВЩгУЕБЧАОпгазюИпОЋЖШЕФВтСПЛњЦїШЫНјаазївЕЁЃШчстПЈTCA ЯЕСаШЋеОвЧ,ЦфБъГЦОЋЖШВтНЧЮЊ±015″,ВтОрЮЊ±(1 mm + 1 ppm·D) ,ИУвЧЦїФмздЖЏЫбЫїЁЂеезМФПБъ,ЪЕЯжНЧЖШЁЂОрРыВтСПздЖЏЛЏ,ЦфВтСПдРэЪЧМЋзјБъЗЈЁЃИУЯЕЭГЕФБъзМХфжУАќРЈTCA ШЋеОвЧЁЂAPSWIN ШэМўКЭИпОЋЖШЪ§ЮЛЪНЮТЖШМЦЁЂЦјбЙМЦЁЃДЫЯЕЭГвбГЩЙІЕигІгУгкЯуИлОХСњЬСЕиЬњЫэЕРдЫгЊМрВт,аТМгЦТЕиЬњЙЋЫОвбНЋЦфзїЮЊГЃЙцзАБИгУгкЕиЬњМрВтЁЃTCA ШЋеОвЧздЖЏМрВтЯЕЭГЕФЙЙГЩШчЭМ1 ЫљЪОЁЃ
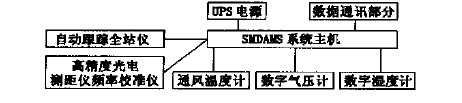
3.2 ЁЁОрРыНЛЛсЗЈ
ИУЗЈгЩжаФЯЙЄвЕДѓбЇеХбЇзЏНЬЪкЬсГі,ЦфШЋГЦЮЊ“SM2DAMS бЧКСУзМЖОЋЖШДѓАгБфаЮздЖЏМрВтЯЕЭГ”,дкЮхЧПЯЊДѓАггаГЩЙІЕФгІгУЁЃБЪепШЯЮЊ,ЖдгкВтНЧБъГЦОЋЖШЮЊ±015″,ВтОрБъГЦОЋЖШЮЊ±(1 mm + 1 ppm·D) ЕФздЖЏИњзйШЋеОвЧ,гЩгкДѓЦјелЩфгыздЖЏеезМЮѓВюЕФгАЯь,ЪЕМЪВтНЧОЋЖШЮЊ±2″,ВтОрОЋЖШНЕЮЊ4 ×10 - 6 ,ВЛФмЪЕЯжДѓАгМрВтЫљвЊЧѓЕФбЧКСУзМЖОЋЖШЁЃНтОіАьЗЈЪЧ:ВЛгУНЧЖШаХЯЂ,жЛгУОрРыаХЯЂ;ЖдОрРыаХЪЉМгИїжжИФе§,ЪЙЦфДяЕНбЧКСУзМЖЁЃжївЊВНжшШчЯТ: ЂйгУВтБпКЭШ§БпНЛЛсЗЈШЗЖЈБфаЮЕуЕФШ§ЮЌзјБъ; ЂкгУЦЕТЪаЃзМвЧЁЂИпЮШЖЈЖШИпОЋЖШЮТЖШМЦЁЂЦјбЙМЦгыЪЊЖШМЦЕШ,ЖдЫљВтБпГЄЪЉМгЦЕТЪИФе§КЭЦјЯѓИФе§; ЂлгУздЖЏжмШеЙлВтММЪѕВтЖЈДѓЦј
ДњБэадЮѓВюЙцТЩ,ЯїШѕДѓЦјДњБэадЮѓВюЕФгАЯьЁЃЭЈЙ§етаЉИФдь,ЯЕЭГзюжеЕФВтОрОЋЖШЮЊ±[ 012 mm + (013ЁЋ014) ppm·D] ,ПЩвдЪЕЯж1 kmзѓгвОрРыЩЯбЧКСУзМЖЕФМрВтОЋЖШ,дкФГаЉГЁКЯШЁДњME5000 ВтОрвЧ[ ±(012 mm + 012ppm·D) ] ,ЯдЪОГіИќИпЕФадФмМлИёБШЁЃ
ИУЯЕЭГЕФБъзМХфжУАќРЈ3 ЬзИпОЋЖШздЖЏВтОрЯЕЭГ(ЦфЙЙГЩМћЭМ2) ЁЂЪ§ОнЭЈаХЩшБИЁЂЗДЩфРтОЕзщЁЂЯЕЭГШэМўЁЂжабыПижЦЪвжїМЦЫуЛњЕШЁЃ
3.3 ЁЁGPS ЗЈ
ИУЯЕЭГгЩЮфККВтЛцПЦММДѓбЇЭъГЩ,гУгкЧхНИєКгбвЫЎПтДѓАгМрВтЁЃGPS ВтСПВЛашвЊВтСПЕуМфЭЈЪг,ЕЋвЊЧѓЖдПеЭЈЪгЁЃдк1 kmзѓгвЕФЖЬЛљЯпЩЯ, GPS ВтСППЩвдЛёЕУбЧКСУзМЖЕФЯрЖдЖЈЮЛОЋЖШЁЃИУЯЕЭГжївЊгаЪ§ОнВЩМЏЁЂзмПиЁЂЪ§ОнДІРэЁЂЗжЮіЁЂЙмРэЮхДѓФЃПщЁЃЪ§ОнВЩМЏВПЗжАќРЈ2 ИіЛљзМЕу,5 ИіБфаЮЕу,ЙВга7 ЬЈAshtech Z - 12 НгЪеЛњ;гЩгкЪ§ОнДЋЪфСПЗЧГЃДѓ,ЙЪВЩгУОжгђЭјДЋЪфЁЃЪ§ОнДІРэНсЙћгаlЁЋ2 h НтКЭ6 hНт,1ЁЋ2 h ЙлВтЕФЫЎЦНОЋЖШгХгк±110 mm ,ДЙжБОЋЖШгХгк±115 mm;6 h ЙлВтЕФЫЎЦНОЋЖШгХгк±015 mm ,ДЙжБОЋЖШгХгк±110 mm;ЖјGPS ЫВЪБЙлВтЕФЫЎЦНЮЛвЦОЋЖШЮЊ±(3ЁЋ5) mm ,ДЙжБЮЛвЦОЋЖШЮЊ±8 mmЁЃ
ИУЯЕЭГФмЙЛЪЕЯжздЖЏСЌајЙлВт,ОЋЖШИп,ЕЋгавдЯТШБЕуашвЊПЫЗў: ЂйВЛФмЪЕЪБЕУЕНИпОЋЖШЕФБфаЮжЕ; ЂкЙлВтЕуБиаыЖдПеПЊРЋ,НгЪеЮРаЧВЛФмЩйгк4 ПХ; ЂлУПдіМг1 ИіЙлВтЕуОЭБиаыЬэМг1 ЬЈGPS НгЪеЛњ,ГЩБОНЯИпЁЃвдЩЯЫљНщЩмЕФ3 жжШ§ЮЌЭтВПБфаЮМрВтЗНЗЈИїгагХШБЕу,ОЋЖШМАЫљашЩшБИБШНЯМћБэ1ЁЃ
аЁРЫЕзДѓАгЭтВПБфаЮЙлВтЩшМЦжївЊВЩгУЪгзМЯпЗЈ,гЩгкАгЬхХгДѓЁЂЪгЯпНЯГЄ,ЪгзМЯпЙлВтФбвдТњзуОЋЖШвЊЧѓЁЃЪЙгУВтСПЛњЦїШЫ(TCA ЯЕСа) дкаЁРЫЕзДѓАгЩЯНјааБфаЮЙлВт,ПЫЗўСЫдЪгзМЯпЙлВтЗНЗЈЕФШБЯнЁЃгЩстПЈTCA ЯЕСаЕФШЋеОвЧХфБИAPSWIN ШэМўЙЙГЩСЫздЖЏМЋзјБъВтСПЯЕЭГ,ПЩвдЪЕЯжЮоШЫжЕЪиМАздЖЏНјааМрВтдЄБЈЁЃЫќФмЙЛздЖЏНјааећЦНЁЂЕїНЙЁЂе§ЕЙОЕЙлВтЁЂЮѓВюИФе§ЁЂМЧТМЙлВтЪ§Он,ДѓДѓЬсИпСЫЙЄзїаЇТЪ,ВЂШЁЕУСЫТњзуЙцЗЖвЊЧѓЕФПЩППЙлВтзЪСЯЁЃИїБфаЮЕуУПжмЦкЕФШ§ЮЌзјБъПЩАДМЋзјБъМЦЫуЙЋЪНЧѓЕУ:
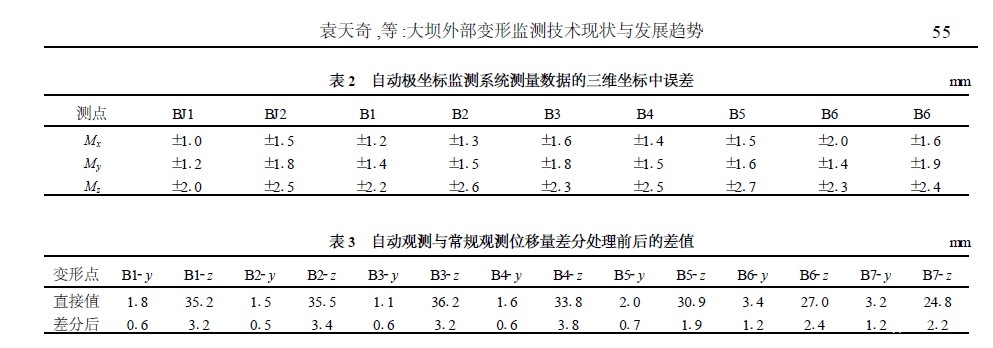
дкУПЦкВтСПЪБ,APSWIN ШэМўПЩИљОн6 ИіВтЛиЕФЙлВтЪ§ОнМЦЫуГіЪЕМЪВтСПЪБЕФНЧЖШОЋЖШmHZ ЁЂmα(″) КЭОрРыВтСПОЋЖШmd (mm) ,АДМЋзјБъЙЋЪНЧѓГіЕФБфаЮЕуЕФШ§ЮЌзјБъЮѓВюЗжБ№ЮЊmXp ЁЂmYp ЁЂmZp (mm) (Ш§ЮЌзјБъЮѓВюЕФМЦЫуЙЋЪНТд) ЁЃИљОнздЖЏМЋзјБъМрВтЯЕЭГЕФВтСПЪ§ОнНјааЗжЮіЁЂЭГМЦ,ЕУГіИїВтЕуЕФШ§ЮЌзјБъЮѓВю,НсЙћМћБэ2 (БэжаИјГіЕФжаЮѓВюЮЊЦНОљжЕ) ЁЃПЩвдПДГі,TCA ШЋеОвЧВтСПБфаЮЕуЕФx ЁЂy ЁЂz зјБъЕФжаЮѓВюОљдк±2 mm зѓгв,ЭъШЋТњзуЭС(ЪЏ) АгАВШЋМрВтЕФОЋЖШвЊЧѓЁЃ
ЮЊСЫМьбщВтСПЛњЦїШЫздЖЏМрВтЕФОЋЖШ,ЮвУЧгУздЖЏЛЏЙлВтЕФжБНгНсЙћКЭОЙ§ВюЗжДІРэЕФНсЙћЗжБ№гыГЃЙцВтСПЗНЗЈ(дкЛљзМЕуЗжБ№ЩшеОгУTC2002 ШЋеОвЧАДБпНЧНЛЛсЗЈВтСП6ВтЛи,МЦЫуБфаЮЕуЕФЫЎЦНЮЛвЦ,гУМИКЮЫЎзМВтСПЪњЯђЮЛвЦ) ЕФНсЙћНјааЖдБШЗжЮі,ИїЯюОЋЖШжИБъОљТњзуДѓАгАВШЋМрВтЙцЗЖЕФвЊЧѓЁЃ
здЖЏМЋзјБъВюЗжДІРэЕФЛљБОдРэЪЧ:УПвЛИіВтСПжмЦкОљАДМЋзјБъЕФЗНЗЈВтСПЛљзМЕуКЭБфаЮВтЕуЕФаБОрЁЂЫЎЦННЧКЭДЙжБНЧ,НЋЛљзМЕуЕФВтСПжЕгыЦфЛљзМжЕ(ЛљзМЭјЕФВтСПжЕ) ЯрБШ,ЧѓЕУВюжЕ,етвЛВюжЕПЩвдШЯЮЊЪЧЪмДѓЦјбЙСІЁЂЮТЖШМАвЧЦїЕШИїжжвђЫигАЯьЕФНсЙћЁЃздЖЏЛЏВтСППЩвддкЖЬЪБМфФк(10min) ЭъГЩвЛИіжмЦкЕФВтСП,ПЩвдШЯЮЊетаЉвђЫиЖдЛљзМЕуКЭБфаЮЕуЕФгАЯьЪЧЯрЭЌЕФ,ПЩвдАбЛљзМЕуЕФВювьМгЕНБфаЮЕуЕФЙлВтжЕЩЯНјааВюЗжДІРэ,МЦЫуБфаЮЕуЕФШ§ЮЌЮЛвЦСПЁЃгЩгкЙлВтЬѕМўЯрЭЌ,РћгУЛљзМЕуЫљЬсЙЉЕФИФе§Ъ§ПЩвдЯћГ§ЙВЭЌЮѓВю,ДѓЗљЖШЬсИпБфаЮМрВтОЋЖШЁЃгУВюЗжДІРэИФе§ЧАКѓЕФНсЙћСагкБэ3ЁЃгЩБэ3 ПЩвдПДГі,ИїЕуЕФОЋЖШДѓЮЊЬсИп,гШЦфЪЧИпГЬ
( z) ЕФОЋЖШЪмЦјЯѓКЭДЙжБелЙтЕФгАЯьЕУЕНСЫКмКУЕФИФе§ЁЃДгаЁРЫЕзДѓАгЭтВПБфаЮTCA здЖЏЛЏМрВтЕФЧщПіПЩвдПДГі,ВтСПЛњЦїШЫгУгкДѓАгЭтВПБфаЮМрВтПЩвдЪЕЯжШЋздЖЏЛЏ,гаЙуЗКЕФгІгУЧАОАЁЃгыГЃЙцЗНЗЈЯрБШНЯЫќОпгавдЯТгХЕу:
(1) ВтСПЗНАИЯШНј,ЯЕЭГзщГЩКЯРэЁЃдкДѓАгМрВтЛљзМЭјЕФЛљДЁЩЯ,ВЩгУВюЗжДІРэПЩЯћГ§КЭМѕШѕИїжжЮѓВюЖдВтСПНсЙћЕФгАЯь,ДѓЗљЖШЬсИпВтСПОЋЖШВЂПЩЭЌЪБЛёЕУУПИіБфаЮЕуЕФЦНУцКЭДЙжБЮЛвЦаХЯЂЁЃ
(2) здЖЏЛЏГЬЖШИп,ПЩППадЧПЁЃЯЕЭГПЩвдЪЕЯжздЖЏМрВт,ВЂПЩЪЕЪБНјааЪ§ОнДІРэЁЂЗжЮі,БЈБэЪфГіЁЃ
(3) МрВтЫйЖШПьЁЂЪБаЇадЧПЁЃЭъГЩвЛИіжмЦкЕФМрВтЙЄзї,НідМаш10 minЁЃ
(4) ЮЌЛЄЗНБуЁЂдЫааГЩБОЕЭЁЃШЋеОвЧздЖЏМЋзјБъВтСПЯЕ
5 ЁЁНсЁЁгя
злЩЯЫљЪі,ДѓАгЭтВПБфаЮМрВтОРњСЫДгЕЭОЋЖШЕНИпОЋЖШ,Ъ§ОнВЩМЏЗНЗЈДгШЫЙЄВтЖСЕНздЖЏВЩМЏ,ЫЎЦНгыДЙжБЮЛвЦгЩЗжБ№ЪЉВтЕНШ§ЮЌБфаЮМрВтЕФЗЂеЙ,ДгЖјПЩвддЄМЦ,ДѓАгАВШЋМрВтММЪѕЕФЗЂеЙЗНЯђЪЧИпОЋЖШздЖЏЛЏЁЃЭЌЪБ,ЫцзХЮЂЕчзгЁЂМЦЫуЛњЁЂЛЅСЌЭјгыПэДјЭјЯжДњаХЯЂММЪѕЕФЗЂеЙ,ЮЊАВШЋМрВтЯЕЭГЕФздЖЏЛЏЁЂМЏГЩЛЏЁЂжЧФмЛЏЕьЖЈСЫМсЪЕЕФММЪѕЛљДЁ,ЪЙЦфдкЙІФмЁЂадФмЁЂПЩППадЕШЗНУцБиНЋИќМгЭъЩЦЁЃ
[1 ] ЁЁеджОШЪ,ЕШ1 ДѓАгАВШЋМрВтЩшМЦгыЪЉЙЄММЪѕЕФЗжЮібаОП[J ]1 Дѓ
АгЙлВтгыЭСЙЄВтЪд,200l ,25 (1) :28 - 321
[2 ] ЁЁГТгРЦц,ЮтзгАВ,ЮтжаШч1 БфаЮМрВтЗжЮігыдЄБЈ[M]1 ББОЉ:Вт
ЛцГіАцЩч,19981
[3 ] ЁЁЗыСж1 ецПеМЄЙтзМжБМрВтДѓАгБфаЮЯЕЭГ[J ]1 ДѓАгЙлВтгыЭСЙЄ
ВтЪд,1999 ,23(5) :39 - 421
[4 ] ЁЁЮтЙњяо1CCD ДЋИаЦїдкЮЛвЦВтСПжаЕФгІгУ[J ]1 ЕиПЧаЮБфгыЕи
е№,1998 ,18(3) :92 - 961
[5 ] ЁЁеХбЇзЏ,ЭѕАЎЙЋ,еХГл1 ЕЅВЈИпОЋЖШВтОрЯЕЭГЕФбаОП[J ]1 ВтЛц
бЇБЈ,1996 ,25(3) :186 - 1901