����ʩ�����ٽ���Ӫ��������Ӱ�����ʵ��
��������¥�
��1����Ϣ���̴�ѧ���ѧԺ������ ֣��450052��
ժҪ�����������ӿ�����������ж�ء����ӽ�ˮ��Ӱ�죬�ٽ����������������������ı䣬��ɵ��������ı��κ�λ�ơ������Զ�������ʵʱ�����������ı��Σ��Ա�֤������Ӫ��ȫ������Ҫ�����������������վ��ҵ������Ŀ���ӿ��ڶ��ٽ���Ӫ����һ���������ṹ������λ�Զ�������Ŀ��ʵ�������Զ�ȫվ�����ϵͳ�ڵ���������ⷽ���ϵͳ�����������������������ȡ����Ч���ȷ������������ʵ��Ӧ�ñ�����ϵͳ�Ը߾��ȡ��Զ��������ƣ���ʱ�ṩ�ɿ��Ķ�̬������ݣ���ѧָ���˻���ʩ������֤�˵�����Ӫ��ȫ��ȡ�������õ�Ч����
�ؼ��ʣ����� ����ʩ�� �Զ�ȫվ�� �Զ����
Abstract:The mechanics change of The metro tunnel influenced by unloading and dewatering due to adjacent foundation pit��it result in Deformation of metro tunnel.monitoring of deformation based on Auto supervisory survey is important for safety of metro’s management. In this article��associate with the project of Damazhan emporia foundation pit of Guangzhou��we dissertate system composition��surveying method��surveying precision and surveying effect of total station auto supervisory system of metro tunnel. The actual application shows that supervisory system provides credible survey data in time by right of high precision and automatization��and guides pit construction scientifically��and ensures metro working safely��it obtains a favorable effect.
Keywords: metro��project of foundation pit��total station��auto supervisory system
ͼ1��ϵͳ����豸��װʾ��ͼ ���� �� �� �� �� X Y 1 2 3 4 5 1 2
����������Ӫһ��ʱ�ں�������绷�������ȶ����䣬���������ṹ�Ƚ��ȶ�����������һ��Ƚϳ����������ٽ����Ϸ����蹹��������ڿ��ڻ��ӽΣ���ж�غͻ��ӽ�ˮ�ȵ�Ӱ�죬�����ṹ�����������仯�����������κ�λ�ơ������δ�С������������ε����أ��DZ�֤������ȫ��Ӫ����Ҫ����֮һ�����ڸ÷���������ڶ̣�Ҫ��ʱЧ��ǿ��ʵʱ�Զ����ʮ�ֱ�Ҫ�����ݴ���վ��ҵ������Ŀ���ڵ���1���߹�ǰվ��ũ����վ������������Ϊ��֤�����İ�ȫ���У��ڻ��ӿ��ں͵�����ʩ����±0.00�ڼ䣬���ܻ���ʩ��Ӱ���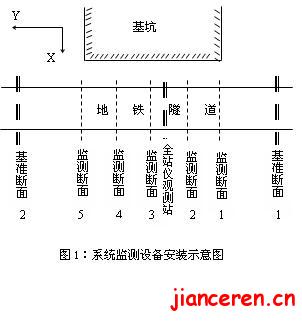
2 �Զ����ϵͳ����
ͼ2������������վ��װʾ��ͼ С�⾵ ����վ
ϵͳ�����������Ա��Ԥ�����£�ʵ���Զ��۲⡢��¼���������洢���������������ơ�����������ʾ�ȹ��ܡ�
2.1 �Զ�ȫվ��
�Զ�ȫվ�Ǿ���ATR��Automatic Target Recognition���Զ�Ŀ��ʶ���ܺ������������ܣ���ʵ�ֶ��⾵Ŀ����Զ�ʶ���뾫ȷ������ˣ��Զ�ȫվ���ֳƲ��������ˡ������̲��õ�����Զ�ȫվ��TCA1800���������IJ�Ǿ���Ϊ1.0������ྫ��Ϊ
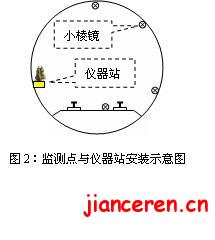
2.2 �۲��⾵
�⾵��Ϊ�۲��־������������˿���̶ܹ����������ϣ��⾵��־�ܱ��Զ�ȫվ���Զ�ʶ�𡢾�ȷ���Ͳ������ڱ������У��������LС�⾵��������ñ�Բ�⾵�����û�������ε��λ���ر�Ҫ���������ӳ�������������������ӳ��з��ֶ���⾵��������������TCA1800��С�ӳ������������ӳ���ȣ���ʹ������������8��9����
2.3 ���������ϵͳ
�м�վ�������ϵͳ�Ŀ������ģ�ͨ��ͨѶ���º�ȫվ�����ӣ����ð�װ�ڼ�����е�ϵͳ��������ʵ�����������̵�ȫ�Զ���������������������������InTMoS����ȫվ���Զ�������������������û����õ�ÿ������ڲ�����ʼʱ�䣬�Զ������������̡��ڲ��������У��Զ��жϸ�����ںͲ�ؼ�IJ����ɹ��Ƿ��ޣ��������Ŀ���ڵ������г�ʻ�����ڵ�����ϵͳ�Զ����к����ȴ�������ͨ���Բ����ɹ��Ƿ����жϺʹ������������˲����ɹ��ľ��ȡ�ÿ�����Զ�����������ϵͳ�Զ�������۲����ά����������λ�����������۲�ֵ���ݣ�����ƽ�����ݡ�λ�������洢��Microsoft Access���ݿ��У�ʵ�����ݵĿ��ٴ洢��������ʵʱ��ʾ�������
ϵͳ�����ṩλ�����ߵ�ͼ����ʾ���ܣ��������������������ά����λ������ʱ��ı仯���ߣ�Ҳ������������ijһ������ά����λ�������λ�ֲ��ı仯������ͬʱ�Զ����ɻ���Microsoft Word��ʽ�ļ�����ݱ�����������ݱ���������������ڵ���ά�������ı仯ֵ���ۼ�ֵ�������Լ������ڵ�ǰ��λ�ۼӱ���ֵ������
3. �ֳ�������
3.1 ������IJ���
�ù��̼������1����վ�㡢3�����㡢20��������ɡ���ͼ1��ʾ����������Զ������������ߣ�������1��2�����㣬������2��1�����㡣�����5�����沼�裬���ڶ�����Լ
����������������𣺵�1λΪ��ĸD���������ε㣻��2λΪ���֣���������ţ���3λΪ���֣������ڸö���ĵ�ţ����1λ�ڵײ������2λ�����²������3λ�����ϲ������4λ�ڶ��������磬D32��ʾ��3�������²��ı��ε㣬����3�����2�ŵ㡣
3.2 ��������
����ϵ����Ϊ�Զ���Ŀռ�ֱ������ϵ����ͼ1��ʾ�������������߷���ΪY����Ǧ������ΪZ�����ڸü����У������б��ε�ֳ�������������е�1��4��5�����3�����㹲15����Ϊ��һ�飬��2��3�����3�����㹲11����Ϊ�ڶ��顣ÿ�����ʱ������ȫԲ�۲ⷨ�۲�������أ������ڵĸ���ز���������жϣ�ȷ���۲�������ÿ����ȫ��������������ֻ��ʱ��15���ӣ�������Ҫÿ�����3��5���ڡ����ÿ��24Сʱ����ϼ�⣬ÿ�������Բ���90�����ڡ�
3.3 �۲����ݵĴ���
�Զ����ϵͳ����ȫվ�ǵļ�������ά����ԭ�������ڸù��̲�����ΧС�����˻���֮��ľ���Ϊ
���������ݷ������������������������仯������IJ��������������������ȫվ�����Զ����������еĶ����㷽λ��Ư�Ƶ�ϵͳ�����ڸü����У�Ϊ�����Ƚ����ַ�����ϵͳ�������ʱ�������˲�ֺ�����ת�����ַ��������ڲ�վ��λ�ڱ����������ֻ�ṩ����ת���Ľ������ֽ����Ϊ�ο���
3.4�۲⾫�ȷ���
Ӱ��۲�ľ��ȵ����غܶ࣬�Ա��ι۲���ԣ����ڲ���ʱ��仯��ϵͳ����������������仯ֵʱ�����������ⷽ��������Բ��迼�ǡ�Ӱ����ι۲⾫�ȵ���Ҫ��������ʱ��仯��ϵͳ��żȻ����Ӱ�졣�Ա�ϵͳ���ԣ�����ʱ��仯��ϵͳ�����Ҫ������������������ĵ�����վ��Ŀ���̶��Ķ�������ʱ��仯��ϵͳ������������ʱ��Ķ����㷽λ��Ư�ơ����������������Ĺ۲�ֵ�ı仯��żȻ�����Ҫ����������ʱ���������Ҫ����Ϊ�����ı�ƾ��ȡ���ʱ��仯��ϵͳ���ͨ�����ò�ַ���������ת���������Ի���������
�����̲��õ���TCA1800ȫվ�ǹ۲⣬����ʵ�ʲ����������ڲ�������ͳ�ƣ�����ʵ�ʸ������ǹ۲�ֵ�Ͳ��۲�ֵ�ľ��ȣ��������1��ʾ��
��1��������۲⾫��ͳ�Ʊ�
|
����� |
ˮƽ�Ǿ��� (²) |
��ֱ�Ǿ��� (²) |
б�ྫ�� (mm) |
����� (m) |
����� (mm) |
|
��1���� |
0.17 |
0.37 |
0.1 |
24.0 |
0.11 |
|
��2���� |
0.32 |
0.67 |
0.1 |
10.0 |
0.11 |
|
��3���� |
0.19 |
0.50 |
0.1 |
7.0 |
0.10 |
|
��4���� |
0.18 |
0.43 |
0.1 |
21.0 |
0.11 |
|
��5���� |
0.22 |
0.45 |
0.1 |
35.0 |
0.13 |
|
������ |
0.33 |
0.66 |
0.1 |
70.0 |
0.27 |
��ͳ�ƽ�����Կ����������̣�TCA1800�ֳ�ʵ�ʵIJ�������Ϊ��ˮƽ�Dz�Ǿ���0.2~0.3�룬��ֱ�Dz�Ǿ���0.5~0.6�룬��ྫ��Ϊ
4.�������Ʒ���
�ü��̾�����һ��ļ��ʱ�䣬��
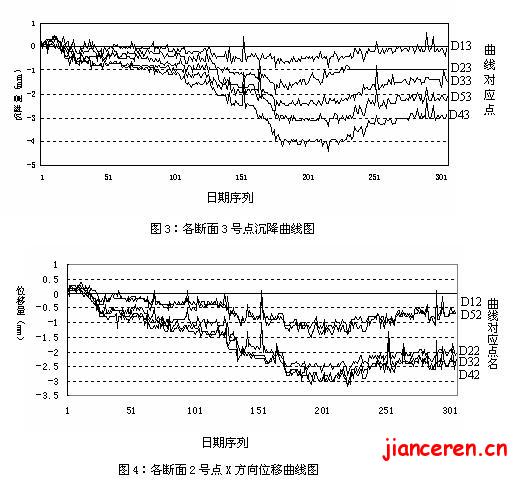
��ͼ3���������ͼ�Ͽ�����Ϊ�³�����Ϊ��������������һ��ʱ���³������ԣ��ڵ�100�쵽��180���³��Ͽ죬��������ԭ����ܺ�ʱ�ڵĻ��ӽ�ˮ�йأ���ά��һ��ʱ��������������һЩ�ص����ڸ������У�4�Ŷ������������Ϊ5���桢3���棬1��2������������ԡ�
��ͼ4������X����λ��ͼ�Ͽ����������������ӷ���λ�Ƶ����ơ�2��3��4����X�����λ�ƽϴ��Ҵ�������ӷ����ƶ������ơ���2��3��4�����У�2�ŵ㡢3�ŵ�λ�ƽϴ����⣬������Y�����ϵ�λ�Ʋ���������������λ�����������ƣ�����ƪ�����ޣ��������߲����г���
���ڵ����ṹ��������λ�ơ�����������λ�ƣ�Ҫ��ﵽ
5 �������
��1�����������Ҫ�ۺϿ��Ǽ��Ҫ����Զ�ȫվ�ǵ��ӳ�Ҫ��װǰҪ������ơ�
��2��ȫվ�ǵĹ���ͼ�������羡������ͬһ·�磬��ù������ֱ������������Ĺ������ϣ��������źŷŴ�װ����ȫվ�ǹ���ϵͳ���а�ȫ��
��3�����ݴ���ѡ������ת���������ڲ�ַ�������������������ȫվ�ǻ����ȫվ��ʱ����ַ���Ҫ��ȷ�ⶨȫվ���������꣬������ת������Ҫ��
��4�������ܲ����г�ͣ��ʱ��⣬��ʱ���Ϊ����ά�ͼ��Σ�����Ա������Ӱ�������Ӫ��ʱ�䣬�г�����ʹ���ٽ������������������������¶ȵ�һ���ԡ�
��5�������Զ�ȫվ�ǿ������Ӵ�ʽ�Զ�����ϵͳ����㡢������ֵ�ء�ʵʱ����̬�ļ���ص㣬����Ӫ�����������β������ά���������ֶΡ�
�������� ͼ3��������3�ŵ��������ͼ D13 D23 D33 D53 D43 �������� ͼ4��������2�ŵ�X����λ������ͼ D12 D52 D22 D32 D42
�����
[1] ������������������������.���ڶ�̨���������˵ļ������ϵͳ[J].���ѧԺѧ����2005��22(2)��154��156
[2] ������.�۵������������μ��[J].���ͨ����2000����5����13��15
[3] ��������֣�˷�.��Ӫ�е����������εĶ�̬��ⷽ��[J].���е�·����飬2005����4����87��89
��������E_Mail: wjd-2002@sohu.com��15981899325��